介紹步進電機可以做到減速控制的原理
步進電機是實現機電一體化關鍵產品中的執行元件���,被人們廣泛使用在現代化的各種自動化減速控制系統中。但是因為現代微電子與計算機技術的高速發展����,導致各行各業對于步進電機的需求量也是與日俱增���,所以現在的國民經濟中各個需要減速控制的領域基本都有應用�。
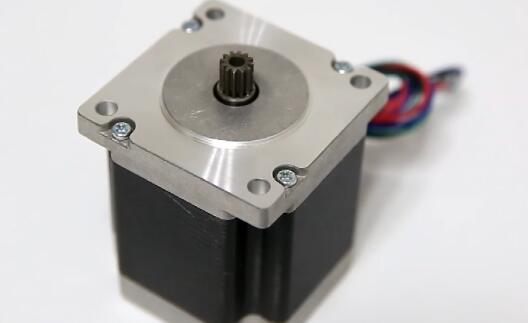
步進電機減速機
步進電機作為一種執行元件�����,它能夠將電脈沖轉化為角位移����。簡單的說是指步進電機驅動器每接收到一個脈沖信號���,就能夠驅動電機按照以設定好的方向轉動一個固定的角度���,并且它旋轉是以固定的角度運行。所以我們可以通過控制脈沖數量來控制角位移量,從而達到精準定位。同時能夠通過控制脈沖頻率控制電機轉動的速度與加速度進行調速。其作為一種控制專用的特種電機�����,因為沒有積累誤差(精度為100%)�,從而被廣泛應用在各種開環控制場所。
一.與步進電機相關的概念;
步進電機的精度:步進電機的精度為100%����,并不會累積誤差��。
步踞角:電機轉動的角度對應每一個發送的脈沖。
定位轉矩:指電機不通電的時候,定子鎖住轉子的力矩。
運行頻率:指不失步運行中���,步進電機的最高頻率��。
細分驅動器:主要是減弱或消除電機的低頻振動�����,從而提高電機的運作精度、降低運行噪音�����。
二.步進電機的控制原理�;
步進電機非常適合于單片機控制,因為它是可以將脈沖信號轉變成角位移的數字控制電機���。
它與其他控制電機最大的區別在于:它靠控制輸入脈沖信號進行控制。即電機的總轉動角度由輸入脈沖數決定�����,而它的轉速由脈沖信號頻率決定��。
步進電機的驅動電路由控制信號工作����,而控制信號由單片機產生�。基本原理如下所述:
(1)控制換相順序����。
通電換相的過程被稱為脈沖分配�。舉個列子�,例如:三相步進電機的各相通電順序為A-B-C-D這樣的三拍工作方式,那么通電控制脈沖就必須按照A����、B、C、D的順序進行分別控制通斷電��。
(2)控制電機轉向�。
如果工作方式是給定了正序換相通電,那么電機就是正常運轉;如果給定反序通電換相��,那么電機就會反向運轉�����。
(3)控制電機速度���。
步進電機接收的控制脈沖數量決定了旋轉步數��。而脈沖之間的間隔越短,電機的旋轉頻率就越快����。這時調整單片機發出的脈沖頻率能夠進行調速�。
申力電機擁有專業的減速步進電機生產研發能力�����,是一家大型的步進電機廠家���。產品品類眾多����、質量有保證,產品生產能力年產百萬臺���。